关键词:倾角传感器,电子罗盘,惯性导航
服务热线:400-661-5248
专业、专注、支持定制
传承品质追求、精益求精的工艺

服务热线:
021-64760177
产品介绍
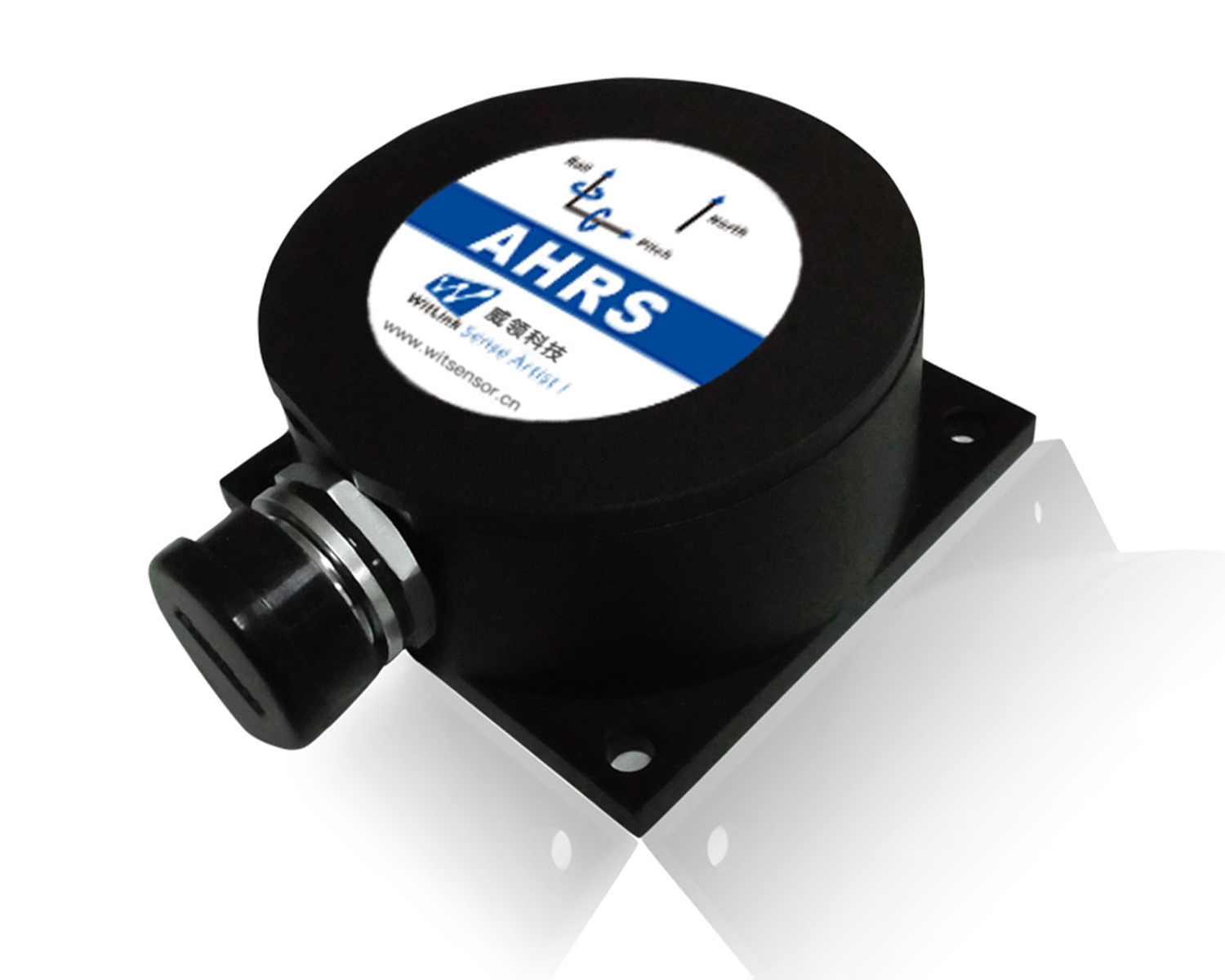
无人驾驶运载车辆在执行复杂的任务时往往需要精确的姿态航向信息,但是不规则运动过程容易导致误差,甚至在静态环境中也不准确。HEC395 9-轴姿态航向参考系统是威领科技专门为动态运动环境提供高精度俯仰、横滚和方位角测量的惯性产品。该产品包涵9自由度传感器:3个加速度传感器,3个磁传感器和3个陀螺仪。通过优化的扩展卡尔曼滤波算法,产品实时输出高精度姿态信息。
HEC395同时具有优异的动态性能,保证了动态测量的高精度。高的性价比让HEC395非常适合高姿态精度要求场合。
主要特性
◆ 航向精度:静止0.5°,运动1°
◆ 动态静态测量
◆ 三轴加速度计、三轴磁力计三轴陀螺
◆ 偏置追踪算法消除漂移
◆ 宽温范围:-40℃~+85℃
◆ 小体积外形:L60 × W59 × H29(mm)
◆ 带硬磁、软磁及倾角补偿
应用领域
◆ 卫星追踪
◆ 钻井设备控测
◆ 光测距仪
◆ 单兵作战设备
◆ ROV水下机器人导航
◆ 海洋勘测
◆ 机器人
◆ 无人飞行器
产品指标
| 电气指标 | ||
| 罗盘航向参数 | 航向精度 | 0.5°(RMS,静态,罗盘工作模式)[1] |
| 1°(RMS,动态航姿工作模式)[1] | ||
| 分辨率 | 0. 1° | |
| 倾斜参数 | 俯仰精度 | 动态0.5°、静态0.2°(RMS) |
| 横滚精度 | 动态0.5°、静态0.2°(RMS) | |
| 分辨率 | 0.01° | |
| 倾斜范围 | 俯仰 ± 90º, 横滚 ± 180º | |
| 校准 | 硬铁校准 | 有 |
| 软铁校准 | 有 | |
| 有限倾斜用户校准 | 有 | |
| 物理特性 | 尺寸 | L60 × W59 × H29 mm |
| 重量 | 140克 | |
| 接口连接器 | 7针 | |
| 接口特性 | 启动延迟 | 50毫秒 |
| 最大采样速率 | 100次/秒 | |
| 串口通信速率 | 2400到115200波特率 | |
| 输出格式 | 二进制高性能协议 | |
| 电源 | 支持电压 | DC 5V(默认)或9-35V(可选) |
| 电流(最大) | 40mA | |
| 工作模式 | 30mA | |
| 环境 | 工作温度 | -40℃~+85℃ |
| 存储温度 | -40℃~+125℃ | |
| 抗振性能 | 3000g | |
[1] 在均匀磁场中
| 电气连接 | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| 线色 | 红色 RED | 蓝色 BLUE | 黑色 BLACK | 绿色 GREEN | 黄色 YELLOW | 棕色 Brown | 白色 White |
| 功能 | 电源 DC 5V | NC | GND 地 | RS232 接收RXD | RS232发送TXD | RS485 B or CANL | RS485 A or CANH |
注:RS485接口和CAN接口只能二选一,默认RS485接口。
更多内容请点击右上方的 产品手册下载



 在线沟通
在线沟通
 短信咨询
短信咨询
 拨打电话
拨打电话